| Ch 9. 3-D Motion of a Rigid Body | Multimedia Engineering Dynamics | ||||||
| Translating Coordinates | Rotating Coordinates | Inertia & Ang. Momentum |
Equations of Motion |
||||
| 3-D Motion: Translating Coordinates | Case Intro | Theory | Case Solution | Example |
| Chapter |
| - Particle - |
| 1. General Motion |
| 2. Force & Accel. |
| 3. Energy |
| 4. Momentum |
| - Rigid Body - |
| 5. General Motion |
| 6. Force & Accel. |
| 7. Energy |
| 8. Momentum |
| 9. 3-D Motion |
| 10. Vibrations |
| Appendix |
| Basic Math |
| Units |
| Basic Dynamics Eqs |
| Sections |
| eBooks |
| Dynamics |
| Fluids |
| Math |
| Mechanics |
| Statics |
| Thermodynamics |
| ©Kurt Gramoll |
|
|
||
|
|
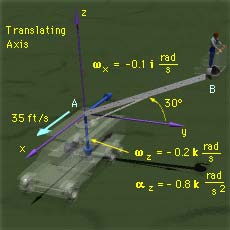
Begin with a diagram at the instant the arm is perpendicular to the path of the truck: Place the origin (Point A) of the translating coordinate axes xyz at the base of the arm, with the positive x axis parallel to the path of the truck. The stationary XYZ axes are fixed to the ground. Using the right-hand rule, we can express the angular velocity and acceleration about the vertical axis as ωz = -0.2k rad/s αz = -0.8k rad/s2 Similarly, the angular velocity about the horizontal axis can be expressed as ωx = -0.1k rad/s The position of the top of the arm (Point B) in the translating system is described by rB/A = 40 cos30j + 40 sin30k The velocity of point B is given by vB = vA + ω × rB/A vB = 41.93i + 2.00j - 3.46k ft/s The acceleration of point B can be found from aB = aA + α × rB/A + ω × ( ω × rB/A) aB = 28.12i - 8.73j - 0.2k ft/s2 |
|