| Ch 9. 3-D Motion of a Rigid Body | Multimedia Engineering Dynamics | ||||||
| Translating Coordinates | Rotating Coordinates | Inertia & Ang. Momentum |
Equations of Motion |
||||
| 3-D Motion: Translating Coordinates | Case Intro | Theory | Case Solution |
| Chapter |
| - Particle - |
| 1. General Motion |
| 2. Force & Accel. |
| 3. Energy |
| 4. Momentum |
| - Rigid Body - |
| 5. General Motion |
| 6. Force & Accel. |
| 7. Energy |
| 8. Momentum |
| 9. 3-D Motion |
| 10. Vibrations |
| Appendix |
| Basic Math |
| Units |
| Basic Dynamics Eqs |
| Sections |
| eBooks |
| Dynamics |
| Fluids |
| Math |
| Mechanics |
| Statics |
| Thermodynamics |
| ©Kurt Gramoll |
|
|
||
|
|
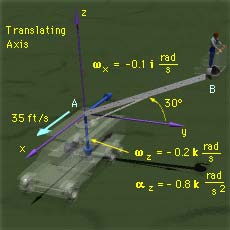
Begin with a diagram at the instant the arm is perpendicular to the path of the truck: Place the origin (Point A) of the translating coordinate axes xyz at the base of the arm, with the positive x axis parallel to the path of the truck. The stationary XYZ axes are fixed to the ground. Using the right-hand rule, we can express the angular velocity and acceleration about the vertical axis as ωz = -0.2k rad/s αz = -0.8k rad/s2 Similarly, the angular velocity about the horizontal axis can be expressed as ωx = -0.1k rad/s The position of the top of the arm (Point B) in the translating system is described by rB/A = 40 cos30j + 40 sin30k The velocity of point B is given by vB = vA + ω × rB/A vB = 41.93i + 2.00j - 3.46k ft/s The acceleration of point B can be found from aB = aA + α × rB/A + ω × ( ω × rB/A) aB = 28.12i - 8.73j - 0.2k ft/s2 |
|

Practice Homework and Test problems now available in the 'Eng Dynamics' mobile app
Includes over 400 free problems with complete detailed solutions.
Available at the Google Play Store and Apple App Store.